LCA - 최소 공통 조상을 사용하는 문제이다.
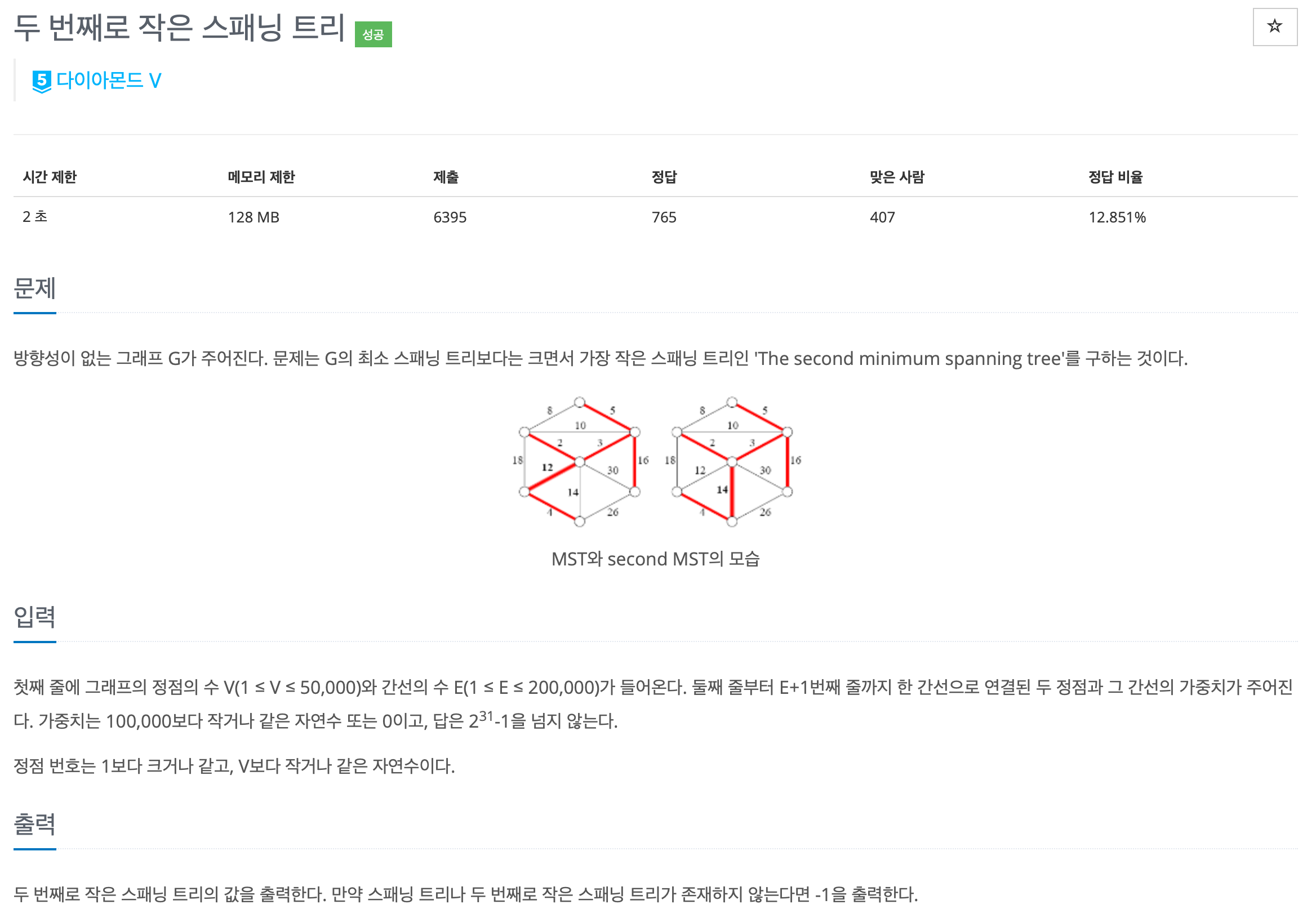
두 번째로 작은 스패닝 트리를 구할 때, MST에 포함되어있지 않은 에지를 골라서 그 에지가 잇는 두 노드의 경로 중 최대값 에지를 빼는 과정이 필요하다.
두 노드의 최단 경로를 찾을 때 LCA 알고리즘을 사용한다.
여기에, "두 번째로 작은" 이라는 조건이 붙으므로, 추가된 에지 비용과 경로 중 최대값 에지의 비용이 같으면 안된다. 그 다음으로 큰 에지를 골라야 한다.
여기까지 생각해보면, LCA에서 사용한 parents[K][V] 배열은 그대로 있어야 하고, path[K][V]를 만들어서 V에서 2^K 조상까지의 경로를 벡터형식으로 저장을 하면 좋을 것 같다. 나중에 두 노드에서 LCA까지 경로를 전부 아니까 거기서 MST 비용보다 큰 노드를 찾기만 하면 되겠지!
라는 생각으로 짰는데 메모리 초과가 되었다.
무식하게 벡터로 저장하는 방식이 너무 메모리를 많이 차지하는것 같다.
생각해보면 가장 큰값이나, 그 다음값만 가지고 있으면 되니 std::pair를 써서 처리하는게 좋아보인다.
pair로 처리를 하고 보니, pair와 pair를 비교해 가장 큰 값과, 두 번째로 큰 값을 구해주는 함수도 따로 만들어야 했다.
코드는 다음과 같다.
#include <iostream>
#include <queue>
#include <vector>
#include <algorithm>
#include <climits>
#include <string.h>
#define MAX_H 16
#define MAX_V 50000
#define PAIR std::pair<int, int>
int UFparents[MAX_V];
int pow2parents[MAX_H + 1][MAX_V + 1];
std::pair<int, int> pathList[MAX_H + 1][MAX_V + 1];
int depth[MAX_V];
typedef struct edge{
int start;
int end;
int cost;
int index;
edge(int s, int e, int c, int i) : start(s), end(e), cost(c), index(i) {}
} edge;
struct cmp {
bool operator()(edge e1, edge e2)
{
return e1.cost > e2.cost;
}
};
void initLCA(int iCurNode, std::vector<std::pair<int, int> > adj[])
{
for(int i = 0; i < adj[iCurNode].size(); i++)
{
int iNextNode = adj[iCurNode][i].first;
int iNextEdge = adj[iCurNode][i].second;
if (depth[iNextNode] == -1)
{
pow2parents[0][iNextNode] = iCurNode;
depth[iNextNode] = depth[iCurNode] + 1;
pathList[0][iNextNode] = PAIR(iNextEdge, -1);
initLCA(iNextNode, adj);
}
}
}
int findParent(int a) {
if (UFparents[a] == a)
return a;
return UFparents[a] = findParent(UFparents[a]);
}
void unionElement(int a, int b) {
int pa = findParent(a);
int pb = findParent(b);
UFparents[pa] = pb;
}
PAIR getMax2Path (PAIR p1, PAIR p2)
{
std::vector <int> temp;
temp.push_back(p1.first);
temp.push_back(p1.second);
temp.push_back(p2.first);
temp.push_back(p2.second);
std::sort(temp.begin(), temp.end(), std::greater<int>());
temp.erase(std::unique(temp.begin(), temp.end()), temp.end());
PAIR ret;
if (temp.size() > 2)
ret = PAIR(temp[0], temp[1]);
else if (temp.size() == 2)
ret = PAIR(temp[0], -1);
else
ret = PAIR(-1, -1);
return ret;
}
int main()
{
int N, E;
std::cin >> N >> E;
for (int i = 0; i < N; i++)
UFparents[i] = i;
std::vector<std::pair<int, int> > adj[N];
std::priority_queue<edge, std::vector<edge>, cmp> pq;
std::vector<edge> vEdgeList;
std::vector<int> vLeftOverEdge;
for (int i = 0 ; i < E; i++)
{
int iNode1, iNode2, iCost;
std::cin >> iNode1 >> iNode2 >> iCost;
iNode2--;
iNode1--;
pq.push(edge(iNode1, iNode2, iCost, i));
vEdgeList.push_back(edge(iNode1, iNode2, iCost, i));
}
int iMSTcost = 0;
int iedgeCount = 0;
while(!pq.empty())
{
edge curEdge = pq.top();
pq.pop();
if (findParent(curEdge.start) == findParent(curEdge.end))
{
vLeftOverEdge.push_back(curEdge.index);
continue;
}
else
{
unionElement(curEdge.start, curEdge.end);
iMSTcost += curEdge.cost;
iedgeCount++;
adj[curEdge.start].push_back(std::pair<int, int> (curEdge.end, curEdge.cost));
adj[curEdge.end].push_back(std::pair<int, int> (curEdge.start, curEdge.cost));
}
}
if (iedgeCount != N - 1)
{
std::cout << -1;
return 0;
}
std::fill(depth, depth + N, -1);
memset(pow2parents, -1, sizeof(pow2parents));
depth[0] = 0;
initLCA(0, adj);
for (int K = 0; K < MAX_H - 1; K++)
{
for (int V = 1; V < N; V++)
{
if (pow2parents[K][V] != -1)
{
pow2parents[K+1][V] = pow2parents[K][pow2parents[K][V]];
pathList[K+1][V] = getMax2Path(pathList[K][V], pathList[K][pow2parents[K][V]]);
}
}
}
// for (int K = 0; K < MAX_H; K++)
// {
// for (int j = 0; j < N; j++)
// {
// std::cout << j << " node to 2^" << K << "anc : ";
// for (int i = 0; i < pathList[K][j].size() ; i++)
// std::cout << pathList[K][j][i] << " ";
// std::cout << "\n";
// }
// std::cout << "\n";
// }
//leftover edge 마다 두 노드 경로 중 최대값을 빼기. MST 와 만약 같다면 다음으로 큰 에지 빼기.
// MST가 없을때. 2번째로 큰 MST 없을때.
int iSecondMST = INT_MAX;
for (int i = 0; i < vLeftOverEdge.size(); i++)
{
int iv = vEdgeList[vLeftOverEdge[i]].start;
int iu = vEdgeList[vLeftOverEdge[i]].end;
int edgeCost = vEdgeList[vLeftOverEdge[i]].cost;
std::vector<int> trackPathList;
PAIR costPair = PAIR(-1, -1);
int iDepthDiff;
if (depth[iv] < depth[iu])
std::swap(iv, iu);
iDepthDiff = depth[iv] - depth[iu];
for (int bit = 0; iDepthDiff; bit++)
{
if (iDepthDiff % 2)
{
costPair = getMax2Path(costPair, pathList[bit][iv]);
iv = pow2parents[bit][iv];
}
iDepthDiff /= 2;
}
if (iu != iv)
{
for (int K = MAX_H - 1; K >= 0; K--)
{
if (pow2parents[K][iu] != -1 && pow2parents[K][iu] != pow2parents[K][iv])
{
costPair = getMax2Path(costPair, pathList[K][iu]);
costPair = getMax2Path(costPair, pathList[K][iv]);
iu = pow2parents[K][iu];
iv = pow2parents[K][iv];
}
}
costPair = getMax2Path(costPair, pathList[0][iu]);
costPair = getMax2Path(costPair, pathList[0][iv]);
}
if (costPair.first == -1 && costPair.second == -1)
continue;
if (costPair.first != -1 && iMSTcost + edgeCost - costPair.first != iMSTcost)
iSecondMST = std::min(iSecondMST, iMSTcost + edgeCost - costPair.first);
if (costPair.second != -1 && iMSTcost + edgeCost - costPair.second != iMSTcost)
iSecondMST = std::min(iSecondMST, iMSTcost + edgeCost - costPair.second);
}
if (iSecondMST != INT_MAX)
std::cout << iSecondMST;
else
std::cout << -1;
}그래프와 MST 와 거의 유사하게 돌아가는데, 경로상 노드의 최대값, 두번째로 큰 값을 가지고 돌아다녀야 한다는 점이 가장 큰 차이점인것 같다.
그 외에는 MST를 찾고 MST에 포함되지 않은 에지를 순회하면서 값을 찾는다는 점이 있겠다.
LCA 러시 주는 이정도로 하고, 다음주 부터는 다른 주제를 슬 보려고 한다...
오늘도 평온한 하루가 되길. 슨민.
'짜잘한 기록' 카테고리의 다른 글
| 백준 2206 벽 부수고 이동하기 (0) | 2021.09.07 |
|---|---|
| [나만 몰랐던 알고리즘] 2D 맵 BFS (0) | 2021.09.06 |
| 백준 15481 그래프와 MST (0) | 2021.09.04 |
| 백준 1761 정점들의 거리 (0) | 2021.09.04 |
| 백준 3176 도로 네트워크 (0) | 2021.09.02 |


